- Japan Cabinet Office’s “Autonomous Underwater Vehicle (AUV) Demonstration Project” -
Toyo Engineering Corporation (President and CEO: Eiji Hosoi, “TOYO”), in collaboration with Nippon Steel Engineering Co., Ltd. (President: Yukito Ishiwa, “NSE”), FullDepth Co., Ltd. (President: Satoshi Yoshiga, “FullDepth”), and Oki Electric Industry Co., Ltd. (Representative Director and CEO: Takahiro Mori, “OKI”), has developed and proposed a roadmap for the practical deployment of a system for unmanned underwater inspection of offshore wind facilities using Autonomous Underwater Vehicles (AUVs*¹) and related marine robotics.
As offshore wind is expected to expand in the coming years, ensuring safe and efficient inspection of subsea structures is becoming increasingly critical. The roadmap outlines a long-term vision for an AUV-based inspection system aimed at reducing operational risk and providing more autonomous, cost-effective workflows.
This initiative was carried out as part of a project commissioned by the Cabinet Office National Ocean Policy Secretariat’s “Autonomous Underwater Vehicle (AUV) Demonstration Project.”
■ Field Demonstration
The roadmap builds on a field demonstration conducted in October 2025 in Numazu, Shizuoka Prefecture, where the project team tested an integrated inspection approach combining ROVs (Remotely Operated Vehicles*²), ASVs (Autonomous Surface Vehicles*³), and AUVs. During this demonstration, inspection work was performed on the underwater section of a test target*⁴ utilizing video and sonar. Through the demonstration, the team identified key technical and operational challenges that must be addressed to enable autonomous, unmanned inspections for offshore wind facilities, such as methods for inspecting seabed-adjacent areas and the operational setup required to run inspections safely and consistently.
A PR video covering the project background, footage, and results is available here : https://youtu.be/GWxvVzF5R9M
■ Roadmap toward AUV Practical Deployment
Based on insights gained from the demonstration, the team examined the future vision for underwater inspection system in 2030 and 2040, with the aim of increasing the efficiency and reducing the cost of underwater inspections for offshore wind facilities.
Specifically, the roadmap explores system configurations, such as combining ASVs and AUVs for autonomous and unmanned inspections over wide areas, with an emphasis on optimizing the allocation of AUVs and marine robotics. Concurrently, it also outlines the key milestones required to accelerate deployment by around 2030, including continued technical development, verification activities, and the conduct of long-term implementation trials.
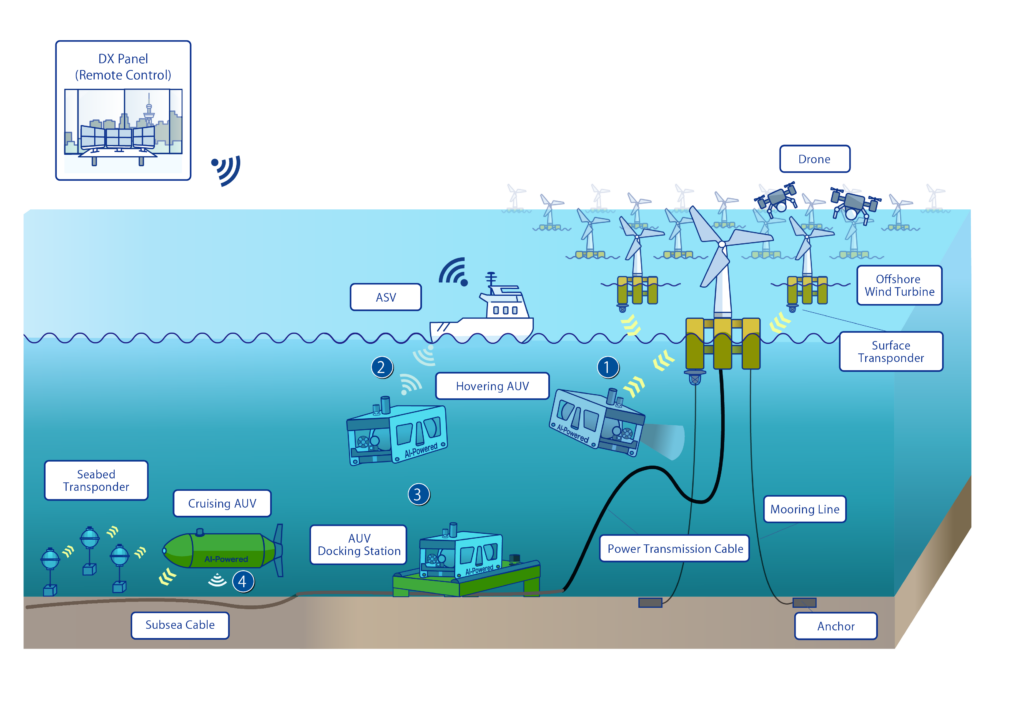 Figure: Conceptual image of the inspection system utilizing AUVs and marine robotics envisioned for 2040*⁵
Figure: Conceptual image of the inspection system utilizing AUVs and marine robotics envisioned for 2040*⁵ ①A Hovering AUV recognizes its underwater self-position with positioning support from surface transponder, performing inspection tasks on mooring lines, power transmission cables, and other underwater facilities. ②The ASV receives inspection data from the AUV via underwater communication and transmits it to a DX panel. ③When its battery level is low, the AUV autonomously moves to AUV docking station for charging and data communication. ④A Cruising AUV recognizes its underwater self-position with positioning support from seabed transponder, inspecting the condition of subsea cables using sonar, etc. illustration:©Toyo Engineering Corporation
【TOYO’s Focus Areas】
■ Conceptual Study for Commercializing the “Service Provider” Model
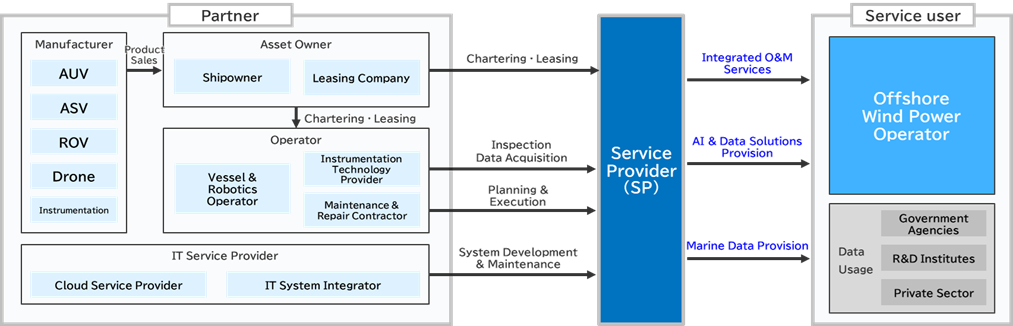
To commercialize maintenance and inspection services for offshore wind power operators or other industries, the presence of a dedicated “service provider” is essential. Its role extends beyond possessing technical capabilities in utilizing AUVs and other marine robotics. It involves orchestrating and integrating technologies and systems from a diverse range of partners―including equipment developers and owners, operational executors, and IT-related service providers―to comprehensively support customer decision-making and project execution.
In this project, TOYO examined and organized the service provider’s role, its potential business models, and the ecosystem, focusing on maintenance and inspection operations in offshore wind power projects.
■ Conceptual Study for a Marine Data Sharing and Utilization Platform
AUVs and other marine robotics are expected to serve as core marine observation assets for acquiring marine data, which is currently lacking in Japan.
In this project, TOYO proposed the establishment of a “Marine Data Space” *⁶), as a platform to enable securely and rapidly distribution and utilization of marine data collected through the utilization of these assets. The project included both technical and operational considerations for implementation.
If realized, this platform is expected not only to support cross-sector utilization of marine data beyond offshore wind―such as fisheries and marine resource development―but also to strengthen Maritime Domain Awareness (MDA*⁷).
■ Looking Ahead
Envisioning the practical deployment of AUVs and other marine robotics around 2030, TOYO aims to create new value in the marine industry through continuous efforts, such as:
・commercializing service provider models targeting offshore wind power projects, and
・establishing marine data utilization platforms that contribute to strengthening MDA.
【TOYO’s Focus Areas】
Project Partners and Roles
This project was carried out jointly by the four companies below. Details are available in each company’s respective website.
|
TOYO |
・Overall project coordination ・Consolidation of implementation issues and roadmap development ・Studies on service provider models and marine data platforms |
|
NSE |
・Coordination of the field demonstration ・Identification of operational challenges for deployment of and other marine robotics ・Studies on service provider models and marine data platforms |
|
FullDepth |
・Provision and operation of the ROV “DiveUnit 300 Lite” ・Identification of technical challenges in developing AUVs and related marine robotics |
|
OKI |
・Provision and operation of the stationary measurement barge “SEATEC NEO” (the test target of field demonstration) ・Identification of technical challenges in underwater infrastructure development |
Notes
*1 AUV (Autonomous Underwater Vehicle): An unmanned underwater vehicle capable of autonomous navigation without human navigation. The field demonstration used “Tri-TON”, developed by the University of Tokyo’s Institute of Industrial Science (Maki Laboratory).
*2 ROV (Remotely Operated Vehicle): An unmanned underwater vehicle operated remotely. The field demonstration used FullDepth’s “DiveUnit 300 Lite.”
*3 ASV (Autonomous Surface Vehicle): An unmanned surface vehicle capable of autonomous navigation. The field demonstration used “Eight Knot I”, equipped with autonomous navigation platform “Eight Knot Inc.’s AI CAPTAIN.”
*4 Test Target: The underwater section of OKI’s stationary measurement barge “SEATEC NEO”
*5 Conceptual image of the inspection system utilizing AUVs and marine robotics envisioned for 2040: A depiction of the inspection system envisioned around 2040, in which continuous improvements to technologies and systems have been made since the early social implementation phase in 2030, ultimately achieving fully autonomous and unmanned inspection operations.
*6 Data Space: A standardized mechanism enabling trusted data sharing across organizations, countries, and industries. (Quote from “Data Space Introduction” by Information-technology Promotion Agency, Japan (IPA))
*7 MDA (Maritime Domain Awareness): The ongoing collection, integration, and analysis of information related to maritime security and maritime activities to achieve comprehensive situational awareness.
===Please refer to the link below===
■ Japan Cabinet Office’s AUV Demonstration Project
website:https://www8.cao.go.jp/ocean/policies/auv/auv_pilot_project/pilot_index.html (Japanese only)
■ 17th July, 2025 Press Release: Selected for Japan Cabinet Office’s AUV Demonstration Project